Aelos edu robot api
无线连接协议
连接方式
- 无线 2.4G USB Dongle
指令格式
设置 Dongle 频率
首先发送 0xCC 0xCC 0xCC 0xCC 0xCC 进入频率设置模式,然后发送
| 指令头 | 频率 |
|---|---|
| 0x29 0x00 0x00 0x00 0x00 0x01 0x00 0x00 | CH |
- CH: Dongle 通信频率,范围:0x00~0x7F
发送按键
| 按键值 |
|---|
| KEY |
- KEY:遥控器按键值,范围:0x01~0x0B
0xD1慢前进0xD2慢后退0xD3往左迈0xD4往右迈0xD5往左转0xD6往右转0xD7快前进0xD8快后退0xDA停止运动
有线连接协议
连接方式
- 有线 Micro USB
指令格式
进入在线模式
机器人必须进入在线模式,才能调整舵机角度
| 指令 |
|---|
| 0x83 |
设置单个舵机角度
| 操作码 | 包序列号 | 保留位1 | 保留位2 | 包长H | 包长L | 校验和1 | 校验和2 | 舵机1 | ······ | 舵机16 |
|---|---|---|---|---|---|---|---|---|---|---|
| 91 | 00 | 00 | 00 | 00 | 10 | 00 | 00 | XX | XX | ······ |
-
舵机角度范围:0x0A ~ 0xBE
-
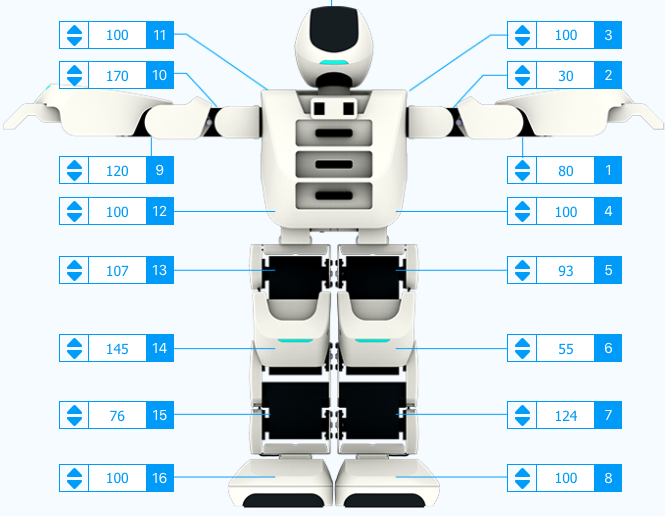
舵机编号图
退出在线模式
退出在线模式,机器人不响应任何在线指令
| 指令 |
|---|
| 0xCC |